
具有单个隐藏层和滞后输入的前馈神经网络,可以用于预测单变量时间序列。将神经网络模型拟合到以时间序列的滞后值作为输入的时间序列。因此它是一个非线性的模型,不可能得出预测区间。
具有单个隐藏层和滞后输入的前馈神经网络,可以用于预测单变量时间序列。将神经网络模型拟合到以时间序列的滞后值作为输入的时间序列。因此它是一个非线性的模型,不可能得出预测区间。
因此我们使用仿真。
读取数据进行可视化:
## # A tibble: 6 x 2 ## Date Actual ## <dttm> <dbl> ## 1 2016-01-11 26 ## 2 2016-01-18 27 ## 3 2016-01-25 28 ## 4 2016-02-01 22 ## 5 2016-02-08 27 ## 6 2016-02-15 31
dat%>%ggplot(aes(Date,Actual))+ labs(title = "耐久性车辆预测", x = "时间", y = "耐用车辆数量", subtitle = " 2016 & 2017年数据") +

#数据必须为数字,tsclean函数才能正常工作 dat%>%dplyr::rename(Date=Week)%>%na.omit() dat_ts = ts(dat\["实际数量"\])
nn(data, lambda=0.5)
Average of 20 networks, each of which is a 1-1-1 network with 4 weights options were - linear output units sigma^2 estimated as 0.2705
我使用了Box-Cox变换,其中λ=0.5,
确保残差同方差。
该模型可以写成:

其中yt-1 =(yt-1,yt-2,⋯,yt-8)是包含序列的滞后值的向量,f是一个神经网络,在单个层中具有4个隐藏节点。
通过从正态分布或从历史值中重采样随机生成ϵt的值,我们可以迭代地模拟该模型的未来样本路径。
因此,如果{ϵ ∗ T + 1}是从时间T + 1的误差分布中随机抽取的,则

是从yT + 1的预测分布中得出的一种概率。设置
y T + 1 =(y T + 1,yT,⋯,yT-6)然后我们可以重复此过程来获得

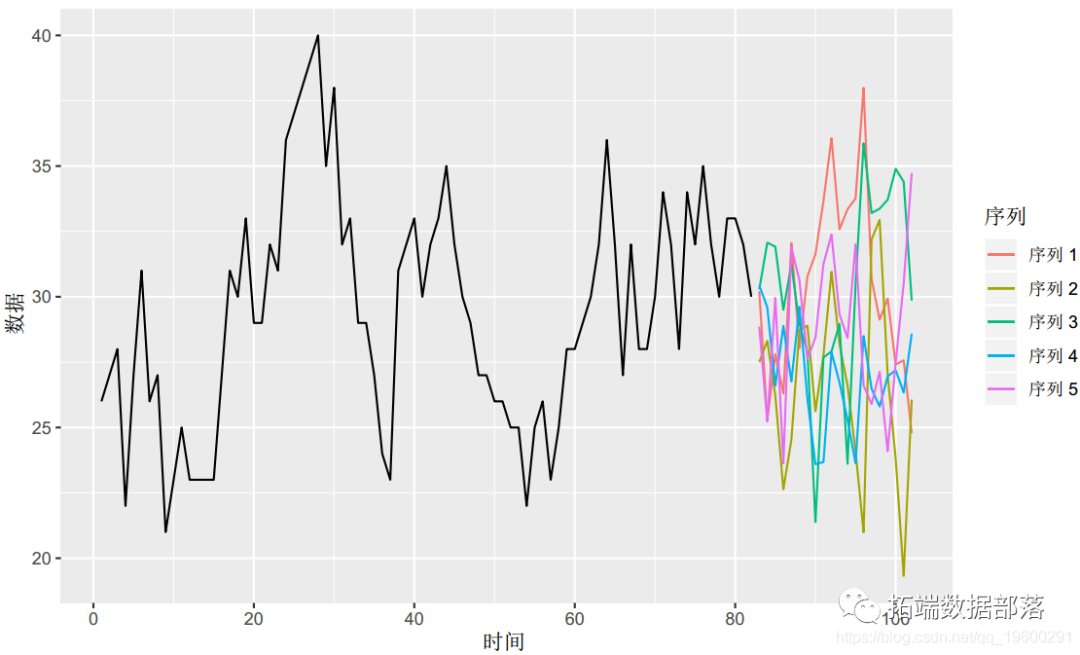
我们可以迭代地模拟未来的样本路径。通过反复模拟样本路径,我们基于拟合的神经网络建立了所有未来值的分布。这是对数据的9种将来可能的采样路径的模拟。每个样本路径覆盖了观测数据之后的未来20年。
plot(dat_ts) + autolayer(sim)
如果执行此操作几百或数千次,则可以很好地了解预测分布。预测区间:
plot(fcast)
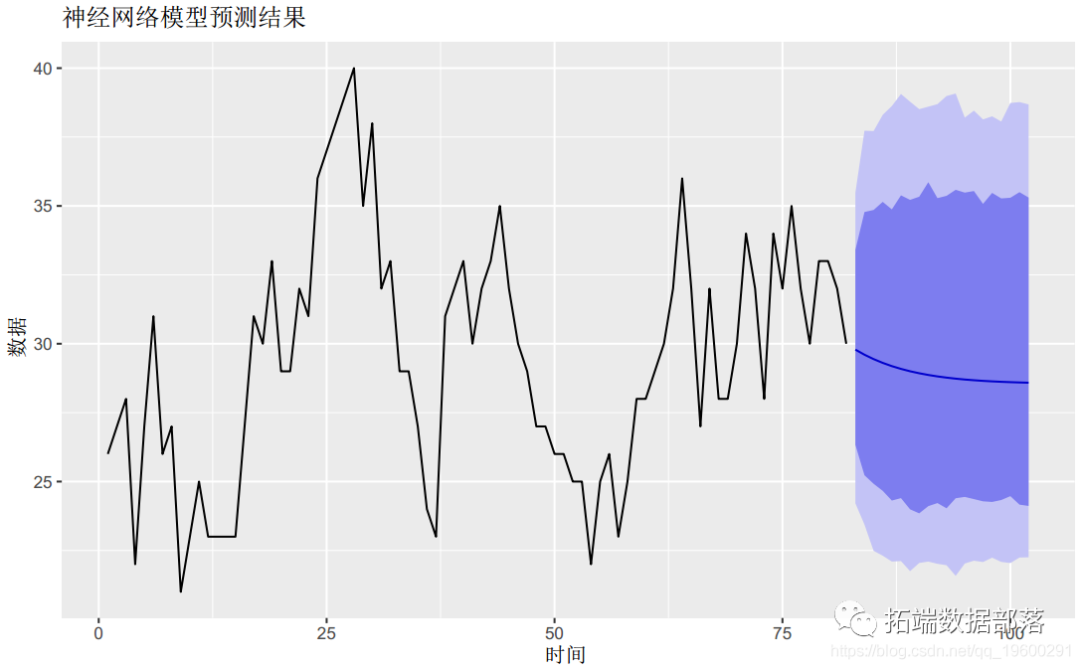
模拟次数为1000。默认情况下,误差来自于正态分布。

发布者:股市刺客,转载请注明出处:https://www.95sca.cn/archives/109347
站内所有文章皆来自网络转载或读者投稿,请勿用于商业用途。如有侵权、不妥之处,请联系站长并出示版权证明以便删除。敬请谅解!





